
飞马无人机管家是飞马机器人科技推出的一站式智能GIS系统,拥有三维航线智能规划、飞行状态实时三维呈现、飞质量现场智能检查及评估、无人机数据智能预处理、智能高精度快速全成果处理、无人机飞行智能监控等功能,有需要的赶快下载吧!

软件特色
"无人机管家"是无人机数据获取、处理、显示管理以及无人机维护的一站式智能GIS系统,包括支持固定翼、旋翼等种类丰富的飞行平台、满足各种应用需求的航线模式、支持真三维地形数据的精准三维航线规划、三维实时飞行监控、快速的飞行质检、丰富的数据处理工具箱、稳健的精度控制和自动成图、丰富的4D+三维成果类型、可视化的监控中心、以及系统升级、智能维护、信息推送等云服务。
一、智航线:三维航线规划,让设计变得简单可靠
"智航线"是固定翼和旋翼无人机航线规划软件,可根据任务区域的地形起伏和影像要求,基于高精度实景三维地形自动生成满足后期处理的最佳飞行方案和航线,并能对超大任务区域进行自动分割和管理,保证后期处理接边需要。
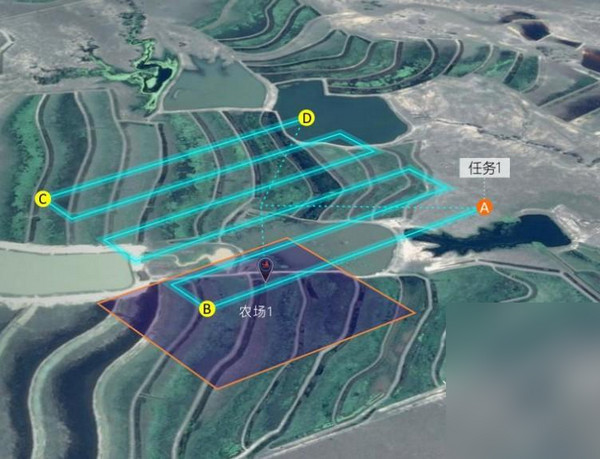
满足各种应用场景的自动航线
根据任务区域范围、地形起伏、影像分辨率、相机型号、重叠度要求等航摄参数,基于高程数据自动生成适应不同地形的最佳任务航线,并且支持条带航线、构架航线、倾斜相机航线、旋翼全景航线、旋翼环绕三维建模航线等。

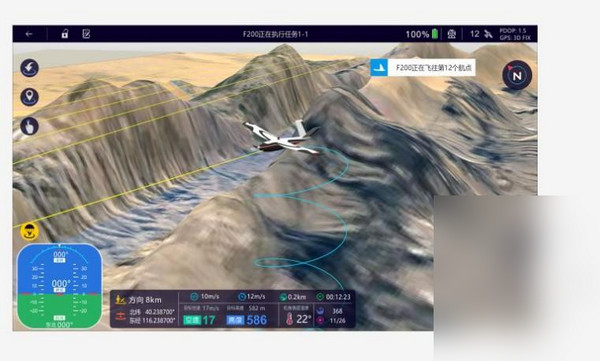
二、智飞行:飞行状态实时三维呈现
"智飞行"是无人机飞行监控软件,可在实景三维场景下实时可视化监控飞行状态和参数,修改飞行状态,智能预警,确保飞行任务的安全执行;以"处理工程"为虚拟架次,根据实际外场情况获取单个架次数据,通过软件自动续飞,完成全区覆盖,提高内外业效率。
1、支持固定翼、旋翼等多种机型统一界面监控,支持航拍视频不同模式监控,支持多种传感器作业。
2、支持三维场景,飞行轨迹状态三维可视化,丰富用户监控信息量,提高监控质量
3、实时可视化显示飞机轨迹、飞机状态、风速地速、电池状况、机上温度以及GPS定位状态参数。
4、支持飞行异常状态智能报警及一键返航功能。
5、飞行全过程可视化回放。
6、引导式界面设计,初学者也可以方便、快捷的完成飞机起飞前的准备工作。
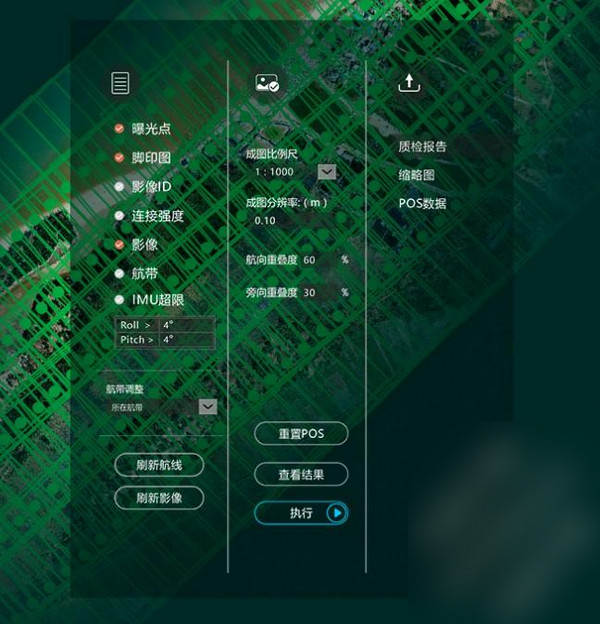
三、智检图:飞行数据和质量报告一目了然
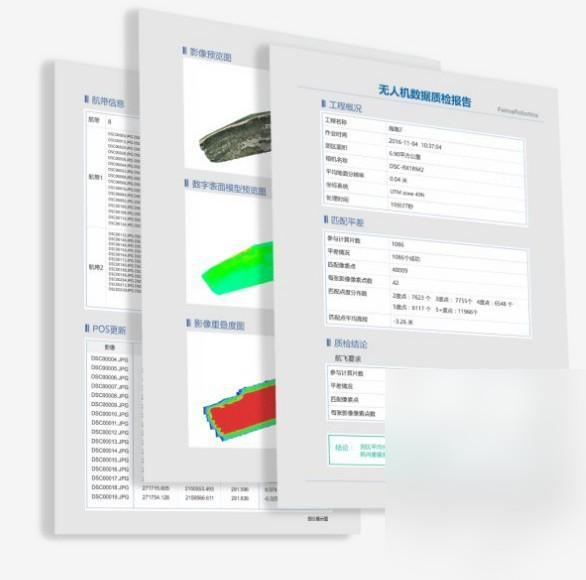
“智检图”是专业用于航飞质量现场检查及评估的自动化软件,可以快速获取航飞质量报告,提高无人机数据质检工序的效率及后期处理可靠性。
1、自动化程度高,一键式操作即可完成航测数据质量检查,无需专业航测背景,简单培训即可掌握。
2、基于GPU的并行计算模式,从影像输入到最终质检报告输出,仅需5~10分钟,便于航飞人员及时发现航测问题采取应对措施。
3、提供无人机数据的专业质检报告,其图形化输出结果及指标化统计文件为航飞质量评价提供可靠依据。
4、可展示影像曝光点、脚印图、姿态超限、影像连接强度等多种信息,便于用户多角度查看数据质量。
四、智理图:丰富的无人机数据处理工具箱
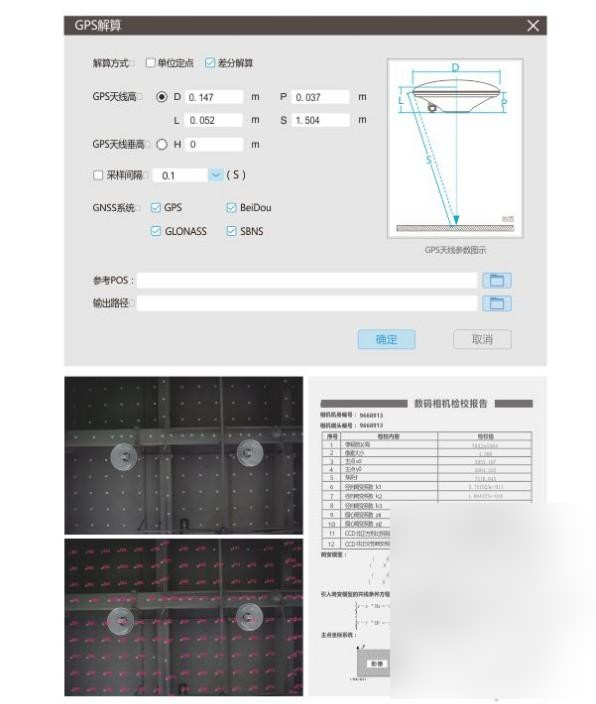
"智理图"是无人机数据预处理软件,通过提供先进的飞行检校 及畸变去除工具、后差分GPS数据处理工具、基于地形的控制 点自动布设等工具,以满足无人机高精度测绘要求。除此之外,还提供影像匀光匀色、增强、金字塔创建、格式转换等预处理功能。

1、先进的相机检校及畸变去除功能:支持地面检校场和空中飞行数据两种检校方式,并支持国内常见相机检校模型的无损精度导入、影像畸变去除等,保证后期空三解算和立体测图的无缝衔接。
2、后差分GPS数据处理:支持基于PPK的一键式差分GPS数据解算,并可自定义天线模型,支持GPS、北斗等卫星数据联合解算,支持标准RINEX格式数据导 入,系统偏心距改正等以保证处理结果的高精度。
3、控制点布设:基于无人机航测规范、硬件定位精度和测区地形情况,自动生成最佳布设方案,并支持人工调整及方案导入到移动设备。
4、成果影像发布:基于成果影像输出符合Google标准的tile数据,并支持移动端在线发布。
五、智拼图:高精度快速全成果处理软件
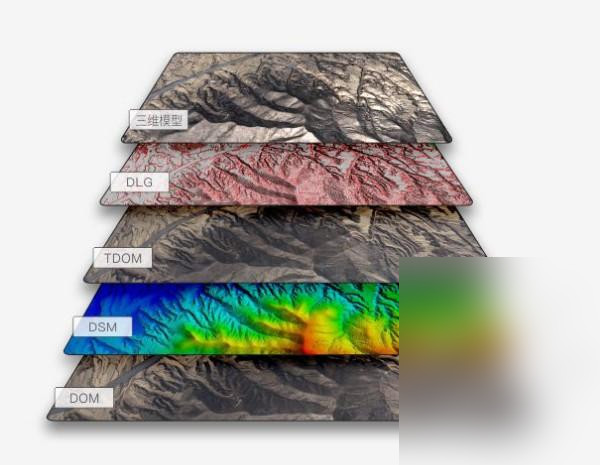
“智拼图”是一款一键式无人机数据处理软件。能够完成无人 机数据从正射空三和倾斜空三、自适应特点匹配、控制点量 测、正射纠正、匀色镶嵌、全像素高密度点云匹配、真正射、 三维重建的全流程,能够输出传统DEM、DOM,并且还支持 高精度、高质量的DSM和tDOM及实景三维模型的成果输出。 并且支持控制点智能量测,支持GPS辅助空三,支持无控制数 据下的PPK直接成图,以及二三维数据的快速游览等。
1、核心算法强大:支持正射和倾斜匹配和空三解算,从容应对影像不规则排列、旋偏角较大、重叠度不规则等情况,并兼容各种相机、地形、天气和环境的影像数据。
2、处理性能强劲,成果类型丰富:无人机管家专业版支持多达万张影像同时处理,支持快速密集点云、真正射和实景三维成果类型。
3、智能控制点量测,GPS辅助空三极大减少外业工作:无人机管家控制点量测支持人工量测和自动量测,并提供稳健的GPS辅助空三算法,保证极少控制点情况下的成图控制精度,提高无人机大比例尺应用效率。
4、基于差分GPS的多参数空三算法,实现无控制高精度直接成图:基于差分GPS-PPK高精度解算和先进多参数空三算法,实现飞马无人机的无控制高精度直接定向成图,满足艰险地区数据获取要求。
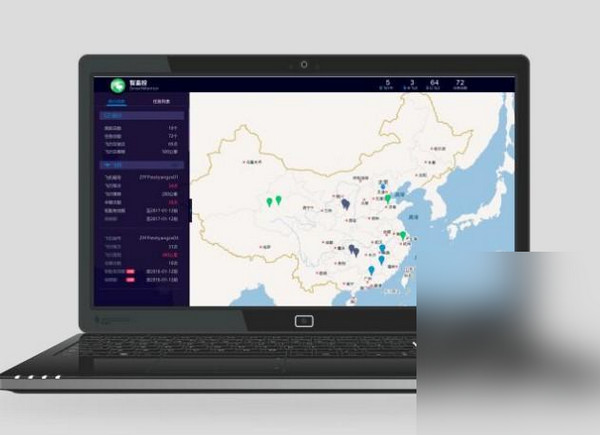
六、智监控:无人机飞行尽在掌控
"智监控" 是无人机管家的特色模块,提供了飞行过程可视化统计回放、飞行记录分析及展示汇总的功能。
更新日志
一、无人机管家(262)
1、深度支持D2000飞机
2、初步支持V1000飞机
3、主界面适配高分屏
4、优化地图刷新逻辑
5、优化固件下载流程,配置文件上的固件由原来的并列下载改为排队下载
6、修复下载模块的潜在问题
7、修复有时会误弹V系列飞控固件升级提示框的问题
8、修复升级界面有时会出现重复项目的问题
9、修复任务回放时,误弹提示框的问题
二、后处理部分(smart_map v2.8.4.4)
智拼图:
1 刺点界面支持人工选择输入坐标顺序功能
2 支持多架次工程的架次任意删除功能
3 集成更新SURE4.0函数库
4 优化2D Mesh 3D Mesh 分布式集群处理及处理进度状态更新
5 优化空三处理逻辑,支持程序自动识别工程状态,避免重复空三处理
6 优化空三处理逻辑,支持刺点完成后直接进行平差优化
7 优化空三处理算法,修复重复空三结果不稳定的问题
8 优化空三进度提示,增加绝对定向与加密点纹理输出进度提示
9 传统正射修复镶嵌线异常BUG及DEM编辑边缘数据异常bug
10 传统正射修复无极缩放传统正射死机BUG
智理图:
1 坐标转换功能支持中误差排序功能
2 GPS Rinex格式转化支持加密飞机序列号的识别转换
3 优化GPS PPK解算代码,优化相关逻辑
4 优化GPS PPK解算代码,支持虚拟基站数据重复下载
5 优化GPS PPK解算代码,虚拟基站数据下载前,程序自动关闭用户防火墙,并提示是否已开启360杀毒软件
6 D2000 GPS解算流动站上传数据文件名由rover.zip修改为数据获取时间+“_rover.zip”,防止多任务并行上传云端冲突
7 修复D2000偏心距改正不出结果bug
8 修复D200单相机偏心距改正后pos最后一行或首行有一行乱码bug;
9 工程整理,修复同组数据重复整理会闪退的bug
10 工程整理,修复开始整理时,隐藏相机与架次的bug
11 工程整理,修复写入EXIF时,进度条不动的bug
12 工程整理,修复导入影像数量小于pos数量,多余的pos也存在的bug。
13 工程整理,修复pos和影像经过筛选后,依然按照全部影像处理的bug。
14 工程整理,修复导入pos时,列标题与列内容宽度不一致的bug。
15 再次浏览影像路径,默认记忆上次影像浏览路径。
16 pos手动改路径名读取时,调整列表宽度适应内容。
17 指定合并pos输出路径,能够记忆原pos浏览路径。